With a little delay, I finally managed to get my hands on some 2.4SINK Sensors by Instruments of Things. Two of them to be more exact, together with one receiver, the 2.4SINK Eurorack Module. Other than the SOMI series that is to be released this summer, the 2.4SINK kit natively only works with control voltages (CVs), to be used in a modular setup (or literally any setup that works). The kit that my university kindly provided, which is currently standing on my desk, sits in a Doepfer casing, where it is connected to a power supply and an Expert Sleepers ES-8 USB audio interface. Furthermore there is an input expansion module on this rack, the Expert Sleepers ES-6, increasing the interface inputs from just four to ten.
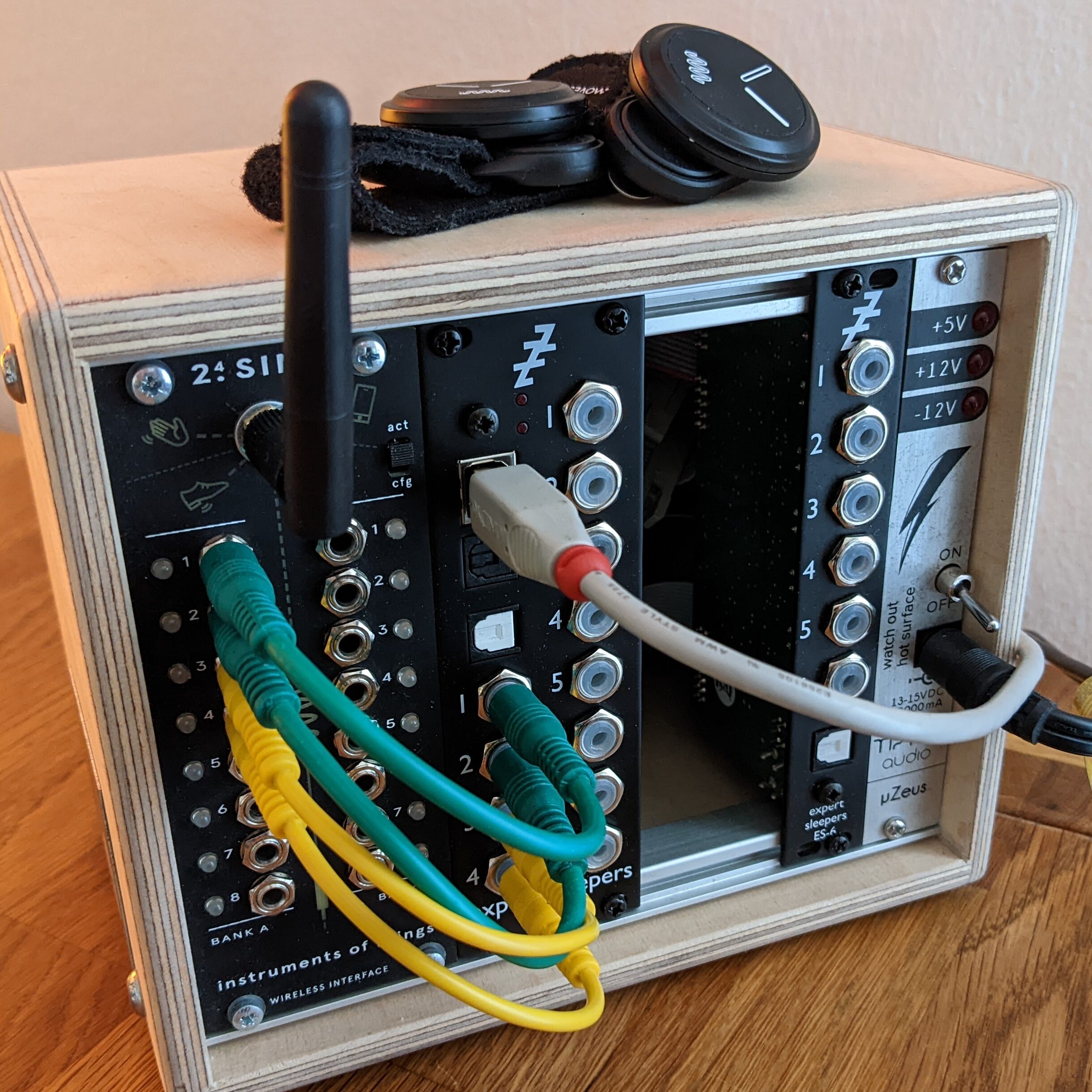
While the SOMI series will have a possibility to connect to USB directly, which fits much better into my concept, the 2.4SINK kit needs an audio interface to bring the signals into my laptop, so I was very glad to see that it had been set up for exactly that purpose already. It still took my a while to get everything working smoothly, from installing audio drivers up to reading through many different manuals. The SINK2.4 kit is very powerful and has many parameters that can be configured (all of its output routing works completely dynamically, controlled via a setup page that can be accessed when connected to the module’s WiFi access point).
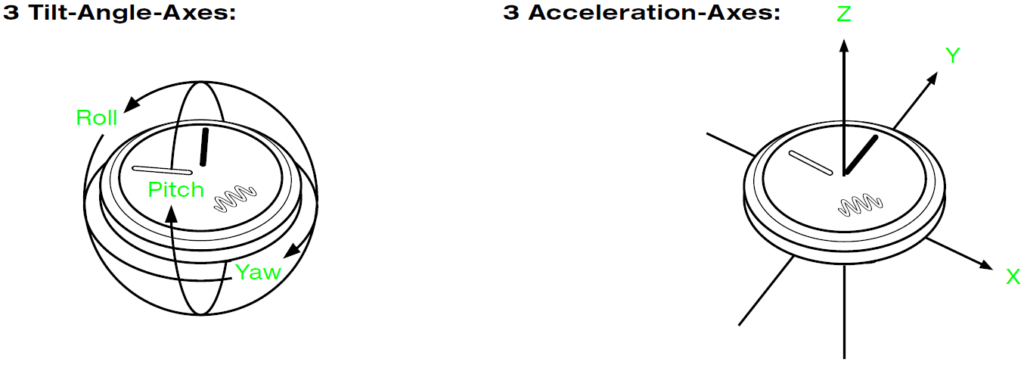
After configuring everything for some first tests, I checked if the signals arrive in my DAW (Ableton). But I quickly decided to start and keep working with those signals mainly where I will need them: in Pure Data. I built a small control panel that visualizes the inputs, so I can get a feeling for the different parameters. For each sensor, there are six different variables that can be read out:
- Roll
- Pitch
- Jaw
- Acceleration X
- Acceleration Y
- Acceleration Z
Reading the inputs like microphone inputs within PD, I can see that the ES-8 already provides me with values between (approximately 0 and 1), which aligns with the fact that I set the signal type of all signals in the 2.4SINK configuration to unipolar. Now the sampled values still come from analogue inputs, so there is still some mathematical work to do to make them safe and reliable to work with. However, this will be a topic for one of my next blog entries.
All in all, I am quite happy and pleased with how the sensors are working. Furthermore, they are unbelievably small and light, but also seem very sturdy, which is a great mix. From the few visual tests I did with them, I could not perceive any latency. I will also try them out in a sound context soon, to finish evaluating the feasibility. Something that leaves me a bit worried about the 2.4SINK kit is the need for USB interface inputs for each variable of each sensor. With the current setup I can not even use all parameters of both sensors simultaneously. That is why the final installation almost requires an Instrument of Things SOMI kit, since otherwise the cost for further input expansion is enormous.